 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformative Path Planning with Guaranteed Estimation Uncertainty
Feb 05, 2026Environmental monitoring robots often need to reconstruct spatial fields (e.g., salinity, temperature, bathymetry) under tight distance and energy constraints. Classical boustrophedon lawnmower surveys provide geometric coverage guarantees but can waste effort by oversampling predictable regions. In contrast, informative path planning (IPP) methods leverage spatial correlations to reduce oversampling, yet typically offer no guarantees on reconstruction quality. This paper bridges these approaches by addressing informative path planning with guaranteed estimation uncertainty: computing the shortest path whose measurements ensure that the Gaussian-process (GP) posterior variance -- an intrinsic uncertainty measure that lower-bounds the mean-squared prediction error under the GP model -- falls below a user-specified threshold over the monitoring region. We propose a three-stage approach: (i) learn a GP model from available prior information; (ii) transform the learned GP kernel into binary coverage maps for each candidate sensing location, indicating which locations' uncertainty can be reduced below a specified target; and (iii) plan a near-shortest route whose combined coverage satisfies the global uncertainty constraint. To address heterogeneous phenomena, we incorporate a nonstationary kernel that captures spatially varying correlation structure, and we accommodate non-convex environments with obstacles. Algorithmically, we present methods with provable approximation guarantees for sensing-location selection and for the joint selection-and-routing problem under a travel budget. Experiments on real-world topographic data show that our planners meet the uncertainty target using fewer sensing locations and shorter travel distances than a recent baseline, and field experiments with bathymetry-mapping autonomous surface and underwater vehicles demonstrate real-world feasibility.
Low-Cost Underwater In-Pipe Centering and Inspection Using a Minimal-Sensing Robot
Feb 05, 2026Autonomous underwater inspection of submerged pipelines is challenging due to confined geometries, turbidity, and the scarcity of reliable localization cues. This paper presents a minimal-sensing strategy that enables a free-swimming underwater robot to center itself and traverse a flooded pipe of known radius using only an IMU, a pressure sensor, and two sonars: a downward-facing single-beam sonar and a rotating 360 degree sonar. We introduce a computationally efficient method for extracting range estimates from single-beam sonar intensity data, enabling reliable wall detection in noisy and reverberant conditions. A closed-form geometric model leverages the two sonar ranges to estimate the pipe center, and an adaptive, confidence-weighted proportional-derivative (PD) controller maintains alignment during traversal. The system requires no Doppler velocity log, external tracking, or complex multi-sensor arrays. Experiments in a submerged 46 cm-diameter pipe using a Blue Robotics BlueROV2 heavy remotely operated vehicle demonstrate stable centering and successful full-pipe traversal despite ambient flow and structural deformations. These results show that reliable in-pipe navigation and inspection can be achieved with a lightweight, computationally efficient sensing and processing architecture, advancing the practicality of autonomous underwater inspection in confined environments.
Multi-Robot Informative Path Planning from Regression with Sparse Gaussian Processes
Sep 19, 2023



This paper addresses multi-robot informative path planning (IPP) for environmental monitoring. The problem involves determining informative regions in the environment that should be visited by robots in order to gather the most amount of information about the environment. We propose an efficient sparse Gaussian process-based approach that uses gradient descent to optimize paths in continuous environments. Our approach efficiently scales to both spatially and spatio-temporally correlated environments. Moreover, our approach can simultaneously optimize the informative paths while accounting for routing constraints, such as a distance budget and limits on the robot's velocity and acceleration. Our approach can be used for IPP with both discrete and continuous sensing robots, with point and non-point field-of-view sensing shapes, and for both single and multi-robot IPP. We demonstrate that the proposed approach is fast and accurate on real-world data.
Efficient Sensor Placement from Regression with Sparse Gaussian Processes in Continuous and Discrete Spaces
Feb 28, 2023



We present a novel approach based on sparse Gaussian processes (SGPs) to address the sensor placement problem for monitoring spatially (or spatiotemporally) correlated phenomena such as temperature. Existing Gaussian process (GP) based sensor placement approaches use GPs to model the phenomena and subsequently optimize the sensor locations in a discretized representation of the environment. In our approach, we fit an SGP to randomly sampled unlabeled locations in the environment and show that the learned inducing points of the SGP inherently solve the sensor placement problem in continuous spaces. Using SGPs avoids discretizing the environment and reduces the computation cost from cubic to linear complexity. When restricted to a candidate set of sensor placement locations, we can use greedy sequential selection algorithms on the SGP's optimization bound to find good solutions. We also present an approach to efficiently map our continuous space solutions to discrete solution spaces using the assignment problem, which gives us discrete sensor placements optimized in unison. Moreover, we generalize our approach to model non-point sensors with an arbitrary field-of-view (FoV) shape using an efficient transformation technique. Finally, we leverage theoretical results from the SGP literature to bound the number of required sensors and the quality of the solution placements. Our experimental results on two real-world datasets show that our approaches generate solutions consistently on par with the prior state-of-the-art approach while being substantially faster. We also demonstrate our solution placements for non-point FoV sensors and a spatiotemporally correlated phenomenon on a scale that was previously infeasible.
GaitSADA: Self-Aligned Domain Adaptation for mmWave Gait Recognition
Feb 01, 2023



mmWave radar-based gait recognition is a novel user identification method that captures human gait biometrics from mmWave radar return signals. This technology offers privacy protection and is resilient to weather and lighting conditions. However, its generalization performance is yet unknown and limits its practical deployment. To address this problem, in this paper, a non-synthetic dataset is collected and analyzed to reveal the presence of spatial and temporal domain shifts in mmWave gait biometric data, which significantly impacts identification accuracy. To address this issue, a novel self-aligned domain adaptation method called GaitSADA is proposed. GaitSADA improves system generalization performance by using a two-stage semi-supervised model training approach. The first stage uses semi-supervised contrastive learning and the second stage uses semi-supervised consistency training with centroid alignment. Extensive experiments show that GaitSADA outperforms representative domain adaptation methods by an average of 15.41% in low data regimes.
Deep Gaussian Processes: A Survey
Jun 21, 2021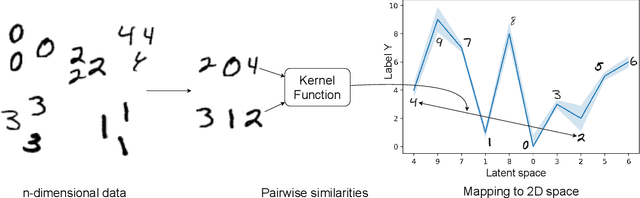
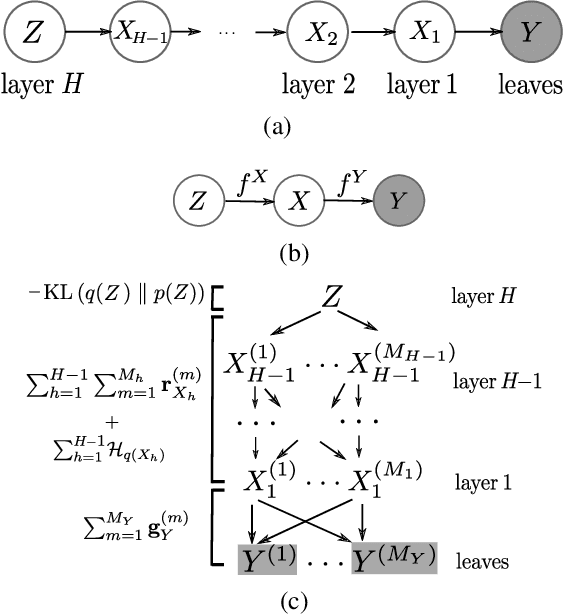
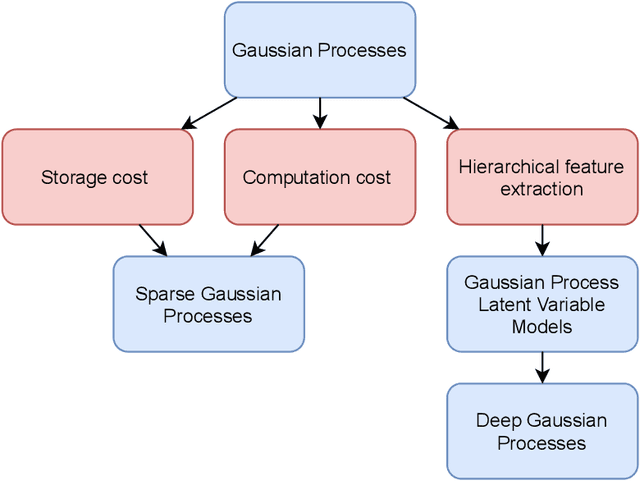
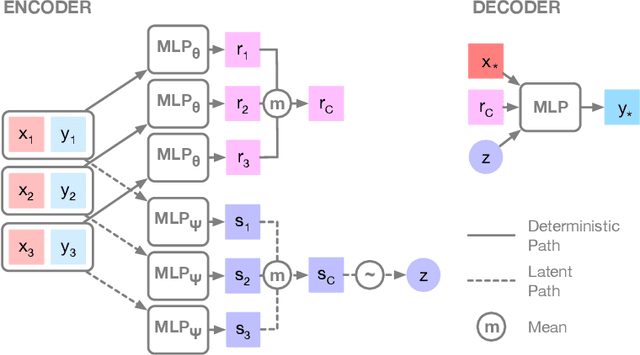
Gaussian processes are one of the dominant approaches in Bayesian learning. Although the approach has been applied to numerous problems with great success, it has a few fundamental limitations. Multiple methods in literature have addressed these limitations. However, there has not been a comprehensive survey of the topics as of yet. Most existing surveys focus on only one particular variant of Gaussian processes and their derivatives. This survey details the core motivations for using Gaussian processes, their mathematical formulations, limitations, and research themes that have flourished over the years to address said limitations. Furthermore, one particular research area is Deep Gaussian Processes (DGPs), it has improved substantially in the past decade. The significant publications that advanced the forefront of this research area are outlined in their survey. Finally, a brief discussion on open problems and research directions for future work is presented at the end.
Deep CSI Learning for Gait Biometric Sensing and Recognition
Feb 06, 2019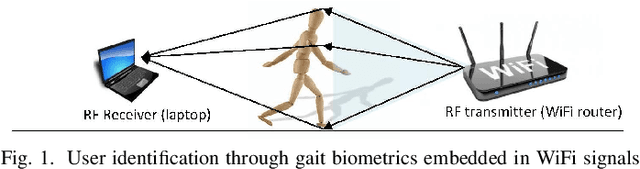
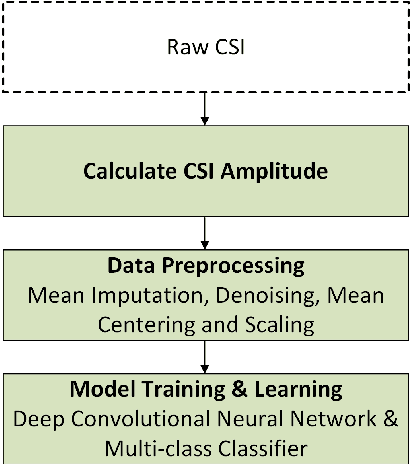
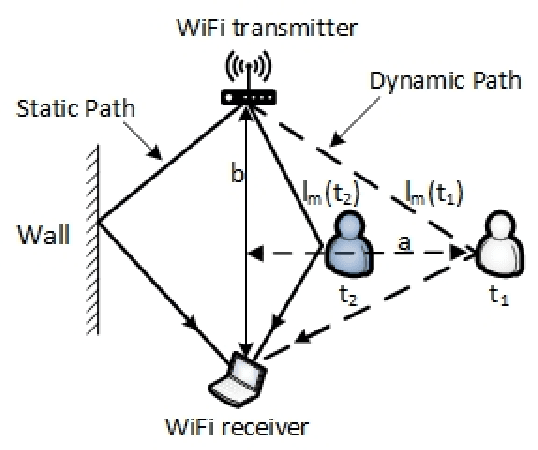
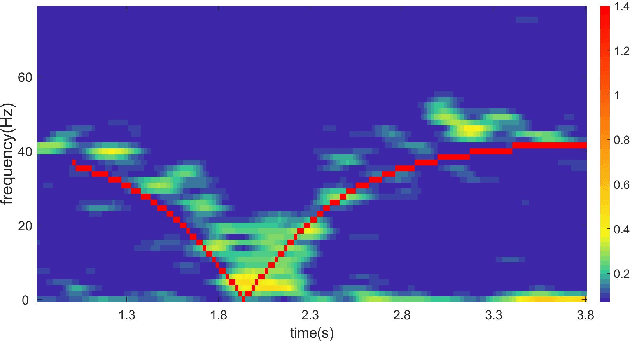
Gait is a person's natural walking style and a complex biological process that is unique to each person. Recently, the channel state information (CSI) of WiFi devices have been exploited to capture human gait biometrics for user identification. However, the performance of existing CSI-based gait identification systems is far from satisfactory. They can only achieve limited identification accuracy (maximum $93\%$) only for a very small group of people (i.e., between 2 to 10). To address such challenge, an end-to-end deep CSI learning system is developed, which exploits deep neural networks to automatically learn the salient gait features in CSI data that are discriminative enough to distinguish different people Firstly, the raw CSI data are sanitized through window-based denoising, mean centering and normalization. The sanitized data is then passed to a residual deep convolutional neural network (DCNN), which automatically extracts the hierarchical features of gait-signatures embedded in the CSI data. Finally, a softmax classifier utilizes the extracted features to make the final prediction about the identity of the user. In a typical indoor environment, a top-1 accuracy of $97.12 \pm 1.13\%$ is achieved for a dataset of 30 people.